Sipos EP, Tebo SA, Zinreich SJ In vivo accuracy testing and clinical experience with the ISG Viewing Wand. Neurosurgery. 1996; 39:194-202
Dyer PV, Patel N, Pell GM The ISG viewing wand: an application to atlanto-axial cervical surgery using the Le Fort I maxillary osteotomy. Br J Oral Maxillofac Surg. 1995; 33:370-374
Mühlemann S, Sandrini G, Ioannidis A The use of digital technologies in dental practices in Switzerland: a cross-sectional survey. Swiss Dent J. 2019; 129:700-707
Chen P, Nikoyan L. Guided implant surgery: a technique whose time has come. Dent Clin North Am. 2021; 65:67-80
Block MS, Emery RW. Static or dynamic navigation for implant placement – choosing the method of guidance. J Oral Maxillofac Surg. 2016; 74:269-277
Wang X, Shaheen E, Shujaat S Influence of experience on dental implant placement: an in vitro comparison of freehand, static guided and dynamic navigation approaches. Int J Implant Dent. 2022; 8
Tang Z, Liu X, Chen K. Comparison of digital panoramic radiography versus cone beam computerized tomography for measuring alveolar bone. Head Face Med. 2017; 13
Balaji SS, Bhat V. A Study to determine the accuracy of various clinical techniques of ridge mapping before implant fixture placement. J Contemp Dent Pract. 2019; 20:499-503
Kunzendorf B, Naujokat H, Wiltfang J. Indications for 3-D diagnostics and navigation in dental implantology with the focus on radiation exposure: a systematic review. Int J Implant Dent. 2021; 7
Mora MA, Chenin DL, Arce RM. Software tools and surgical guides in dental-implant-guided surgery. Dent Clin North Am. 2014; 58:597-626
Apostolakis D, Brown JE. The anterior loop of the inferior alveolar nerve: prevalence, measurement of its length and a recommendation for interforaminal implant installation based on cone beam CT imaging. Clin Oral Implants Res. 2012; 23:1022-1030
Greenstein G, Tarnow D. The mental foramen and nerve: clinical and anatomical factors related to dental implant placement: a literature review. J Periodontol. 2006; 77:1933-1943
Fortin T, Isidori M, Bouchet H. Placement of posterior maxillary implants in partially edentulous patients with severe bone deficiency using CAD/CAM guidance to avoid sinus grafting: a clinical report of procedure. Int J Oral Maxillofac Implants. 2009; 24:96-102
Tatakis DN, Chien HH, Parashis AO. Guided implant surgery risks and their prevention. Periodontology 2000. 2019; 81:194-208
Pozzi A, Tallarico M, Marchetti M Computer-guided versus free-hand placement of immediately loaded dental implants: 1-year post-loading results of a multicentre randomised controlled trial. Eur J Oral Implantol. 2014; 7:229-242
Mangano F, Gandolfi A, Luongo G, Logozzo S. Intraoral scanners in dentistry: a review of the current literature. BMC Oral Health. 2017; 17
Basten CH, Kois JC. The use of barium sulfate for implant templates. J Prosthet Dent. 1996; 76:451-454
Zahran MH, Fenton A. A radiopaque implant template for partially edentulous patients. J Prosthet Dent. 2010; 103:390-392
Al Yafi F, Camenisch B, Al-Sabbagh M. Is digital guided implant surgery accurate and reliable?. Dent Clin North Am. 2019; 63:381-397
Tahmaseb A, Wu V, Wismeijer D The accuracy of static computer-aided implant surgery: a systematic review and meta-analysis. Clin Oral Implants Res. 2018; 29:416-435
Widmann G, Bale RJ. Accuracy in computer-aided implant surgery – a review. Int J Oral Maxillofac Implants. 2006; 21:305-313
Debortoli C, Afota F, Latreche S Stackable guide in implantology: a technical note. J Stomatol Oral Maxillofac Surg. 2023;
Mijiritsky E, Ben Zaken H, Shacham M Variety of surgical guides and protocols for bone reduction prior to implant placement: a narrative review. Int J Environ Res Public Health. 2021; 18:(5)
Markovic A, Lazic Z, Misic T Effect of surgical drill guide and irrigans temperature on thermal bone changes during drilling implant sites – thermographic analysis on bovine ribs. Vojnosanit Pregl. 2016; 73:744-50
Migliorati M, Amorfini L, Signori A Internal bone temperature change during guided surgery preparations for dental implants: an in vitro study. Int J Oral Maxillofac Implants. 2013; 28:1464-1469
Alevizakos V, Mitov G, von See C. Guided implant placement using an internally cooling surgical template: a technical note. J Oral Implantol. 2020; 46:533-535
Vermeulen J. The Accuracy of implant placement by experienced surgeons: guided vs freehand approach in a simulated plastic model. Int J Oral Maxillofac Implants. 2017; 32:617-624
Panchal N, Mahmood L, Retana A, Emery R Dynamic navigation for dental implant surgery. Oral Maxillofac Surg Clin North Am. 2019; 31:539-547
Strong EB, Rafii A, Holhweg-Majert B Comparison of 3 optical navigation systems for computer-aided maxillofacial surgery. Arch Otolaryngol Head Neck Surg. 2008; 134:1080-1084
Wei SM, Zhu Y, Wei JX Accuracy of dynamic navigation in implant surgery: a systematic review and meta-analysis. Clin Oral Implants Res. 2021; 32:383-393
Abdelhay N, Prasad S, Gibson MP. Failure rates associated with guided versus non-guided dental implant placement: a systematic review and meta-analysis. BDJ Open. 2021; 7
For dentists who were trained without computers and planning software, the introduction of any sort of digital technology can be met with reservation. Clinicians had to weigh the benefits of a new technique versus the cost and time involved in making it an effective investment. In low- and middle-income countries, the introduction of guided implant surgery is still in a nascent state. The procedures that fall into this category merge patients' data, both clinical and radiographic, to better visualize and guide access to the target site. Guided implant surgery is a minimally invasive, reproducible technique that substantially reduces the risk of injuring critical anatomical structures. Previously published data on guided implant surgery are limited and contain outdated methodology. In this review, the authors introduce the benefits, general principles and updated clinical workflow for guided dental implant surgery.
CPD/Clinical Relevance: Guided implant surgery is a reproducible technique that results in predictable implant placement.
Article
At the end of 19th century, the discovery of X-rays led to the development of a non-invasive clinical technique to assess the internal anatomical structures. By the late 1970s, advancements in the field of technology allowed clinicians to view three-dimensional images of tomographic scans. These images were about 100 times more sensitive than conventional radiographs. Later, software was introduced that could guide a clinician's probe to a target point chosen on the three-dimensional scans. The first surgical navigation unit, called the ‘Viewing Wand’, was used in 1992 in the field of neurosurgery to plan the procedure and, in real time, navigate the surgery.1 This significantly reduced the chance of adverse outcomes for the patient and offered improved clinical safety.2 This resulted in a paradigm shift and surgeons no longer needed to expose a patient to a knife to know what was underneath. Guided surgery became the standard of care in neurosurgery in early 2000. It was only time before guided surgery paved its way in implant dentistry.
For dentists who were trained without computers and planning software, the introduction of any sort of digital technology can be met with reservation. Clinicians have to weigh the benefits of a new technique versus the cost and time involved in making it an effective investment. According to a study by Muhlemann et al,3 the use of intra-oral scanners for digital impressions was limited to 20–25%, representing the decreased penetration of these new techniques to practitioners.
In low- and middle-income countries, the introduction of guided implant surgery is still in a nascent state. The procedures that fall into this category merge patients' data, both clinical and radiographic, to better visualize and guide access to the target site. Previously published data on guided implant surgery is limited and often contains outdated methodology.4,5 In this review, the authors introduce the benefits, general principles and updated clinical workflow of guided dental implant surgery.
Guided implant surgery
Previously, implant placement was the domain of specialists, but it has now become a treatment modality used by some general dentists, although it should be noted that this increases their need for clinical training.6 Implant therapy follows a restoratively driven approach and is governed by aesthetics and function, and limited by anatomical constraints. Correct implant positioning is critical to successful implant outcomes.
Implants have traditionally been planned through clinical examination, study casts, two-dimensional radiographs (peri-apical and panoramic) and bone mapping. The two dimensional (2D) view does not allow proper visualization of the bucco-lingual dimension, neither does it allow accurate spatial orientation.7 Bone mapping requires the use of a caliper-like device directly over the bone after effective local anesthesia.8 These shortcomings were overcome by the introduction of three dimensional (3D) cone beam computed tomography (CBCT).9 For most clinicians, the use of CBCT is limited to diagnostic applications, such as evaluation of anatomical structures and post-extraction bone resorption.
The problem that existed was a lack of a precise transfer mechanism of the planned implant position onto the implant site. As a result, deviations from the predetermined implant positions occurred frequently, and this made subsequent implant restorations significantly challenging. The introduction of virtual software that could integrate information from CBCT, and intra-oral surface anatomy proved to be a game changer in implant dentistry. Guided implant surgery is now available to transfer this information from planning software on computer to the surgical field.10
Advantages and disadvantages of guided implant surgery
Guided implant surgery is a minimally invasive, reproducible technique that substantially reduces the risk of violating critical anatomical structures (nerves, vessels, roots of teeth and maxillary sinus).11,12 The surgical stents made via this technique allow for smaller flaps, sometimes eliminating them in favour of flapless surgery. All available bone height and width can be used to the millimetre. This reduces the need for complex bone grafts by allowing placement of longer/wider implants even at greater angulations.13 Finally, guided surgery saves intra-operative time, particularly in complex cases, and ensures implant parallelism.14
On the other hand, guided surgery requires increased time for treatment planning. Pozzi et al15 reported that guided implant surgery cases required 10 additional minutes of planning time (28.2 minutes total) when compared with conventional freehand implant surgery (18.8 minutes total). There is also the additional cost of guide fabrication for each case. This technique also has specific hardware and software requirements. Additionally, special instruments and drills are needed to carry out the procedure. Since this is a newer technique for most, there is a learning curve to be overcome before getting used to this treatment modality.14
Static guided implant surgery
With respect to dental implant placement, guided implant surgical techniques can be divided into static guided surgery and dynamic guided surgery. Static guided surgery requires use of surgical guides to allow reproduction of planned implant placement in terms of position, angle, and depth. The guides are specific to each patient and can be one of three types: tooth-supported; mucosa-supported; and bone-supported.
Clinical workflow
Data acquisition
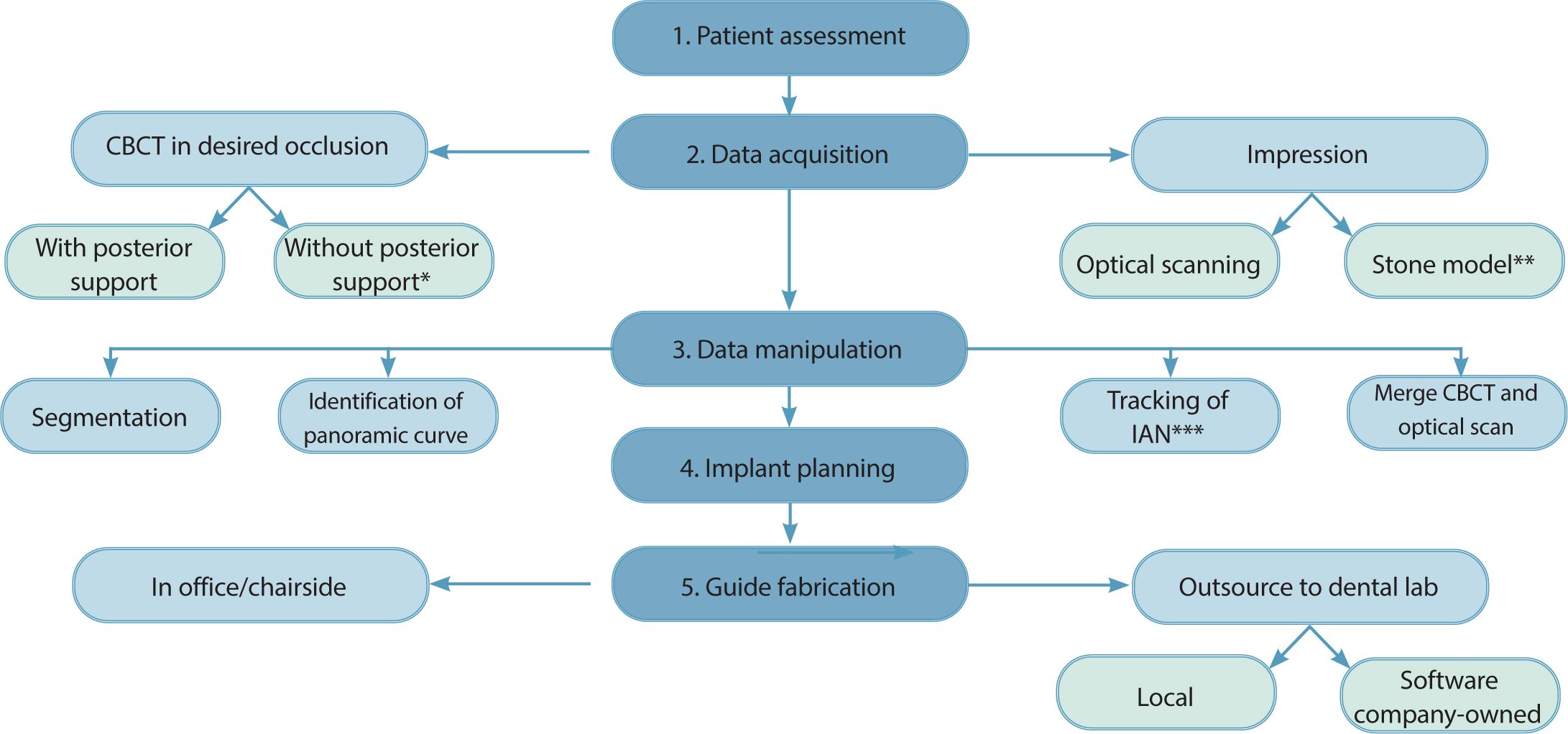
A summary of the clinical workflow is provided in Figure 1. After assessing suitability of a patient to receive implants, the clinician needs to acquire data to plan for surgery. This involves acquiring raw data from patient's impressions (optical scanning or conventional) and a CBCT scan in the desired occlusion. Using an intra-oral scanner is quite convenient for a completely digital workflow. The image file obtained from the scanner can be overlaid onto CBCT scans for easy manipulation.16 Alternatively, in cases where a conventional impression technique has been used, the resultant stone models can be sent to a dental laboratory where laboratory scanners are used to scan the model. In either case, the image file is converted to standard tesellation language (STL) format for it to be compatible with planning software.
Figure 1. Summary of clinical workflow showing steps involved in guided implant planning. *: Requires denture fabrication and radiopaque identifiers; **: requires laboratory scanning; ***IAN: inferior alveolar nerve.
The term ‘desired occlusion’ is emphasized for cases without posterior support or completely edentulous arches. For these patients, it is required that an occlusal rim or denture be fabricated prior to a CBCT scan. Different ways that mediate accurate reproduction of the denture onto the scan involve incorporating some form of radiopaque marker.4 The first method involves fabrication of an acrylic denture with barium sulphate teeth.17 The teeth to be replaced by implants should be fabricated with 10–20% barium sulphate, which makes them radiopaque and easily identifiable on CBCT. Other methods involve use of radiopaque fiducial markers. These are available commercially, but gutta percha can also be used to mark points on the denture. It is recommended that at least eight fiducial markers be used for this purpose.18 The last method includes use of proprietary scanning plates, for example the SICAT plate (Dentsply Sirona). These are usually part of a close-ended system requiring a scanning plate, CBCT scanner, and planning software from a single manufacturer.
Data manipulation/virtual planning
Manipulation of data involves virtual dissection and orientation of the CBCT file. Virtual dissection, also known as segmentation, allows for the differentiation and colourization of anatomical structures and areas of interest. This reduces the image distortion caused by metal scattering and motion artefacts.19 To further reduce image distortion, some software also benefits from identification of the panoramic curve. However, newer planning software does not require this post-processing phase and has in-built algorithms to reduce scatter. Tracking of the inferior alveolar nerve is also an important step for mandibular implant placement.
The most important next step is to overlap the digital impression onto the CBCT file. For dentate patients, this is relatively straightforward. The current generation of planning software requires designation of points on the digital impression (e.g. canine tip, buccal groove of first molar, mesio-incisal edge of central incisor, etc) and reproducing them on the CBCT scan. Once this is done, the images are merged and orientated. For edentate patients, the same process needs to be reproduced with the help of radiopaque markers, as mentioned previously.
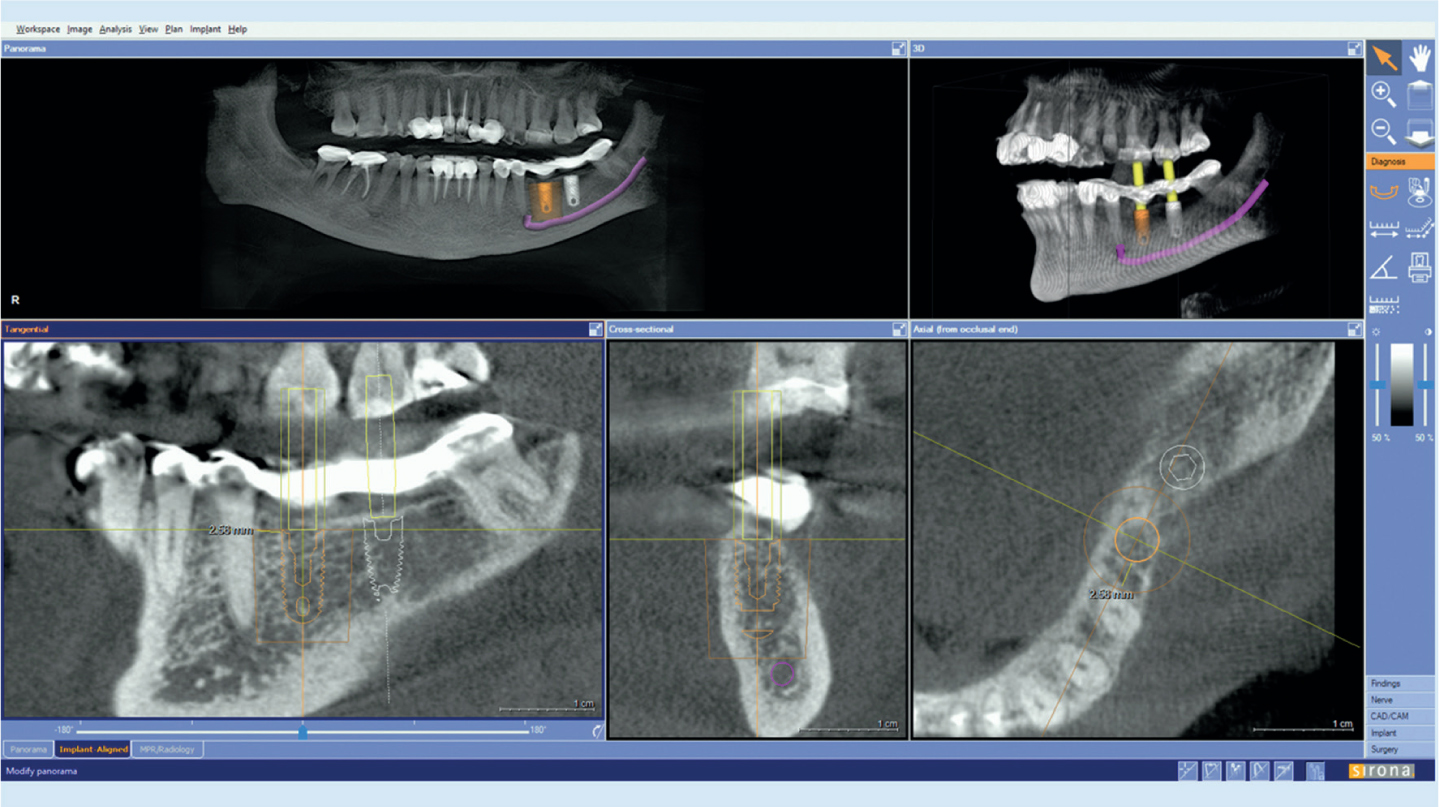
Implant planning software allows virtual placement of implants at the desired site (Figure 2). The planning software contains a catalogue of all the popular implant brands and is updated regularly. Since the data have been merged at this point, it becomes easier to employ a prosthetically driven approach.
Figure 2. Virtual implant planning for missing molars in mandibular left quadrant. Anatomical structures, the inferior alveolar nerve (purple) and bucco-lingual width, are being considered.
Manufacturing of surgical guides
After finalizing the stent decisions, the question arises about stabilization of the stent/guide in situ. The clinician can choose to fabricate a tooth-supported, bone-supported, or mucosa-supported guide. In either of the three types of guides, it is important to verify proper fitting and seating before surgery.
Tooth-supported guides provide the most accurate results and require the least surgical exposure.20,21 When teeth have poor periodontal health, are fractured or when the patient is completely edentate, the clinician can opt for a bone-supported guide. This has a limitation in that it requires a larger flap to be raised to allow fixation with pins to existing bone for the guide to be stable and precise. Alternatively, mucosa-supported guides can be fabricated. These guides are the least invasive, but have the disadvantage of being the least accurate, usually as a result of them not having enough stability.5 Apart from this, stackable guides can also be used in the case of long-span bridges or edentulism. This also necessitates all of the steps, such as CBCT scans with and without removable prosthesis, digital impressions in occlusion, proper vertical dimension of occlusion and manufacturing of prostheses and surgical guides. The stackable guide protocol usually includes a bone foundation guide (first guide for bone reduction), drill guide (for implant osteotomies) and carrier guides (that have posts for anchoring transitional prostheses over multi-unit abutments).22,23
After deciding on the type of surgical guide, the clinician can employ one of three ways to fabricate a stent. The clinician can send their case to a dental laboratory that deals with digital workflow; or to a dental laboratory owned by or attached to a software company; or with use of in-office subtractive (computer aided design/computer aided manufacturing) or additive manufacturing (three-dimensional printing) techniques. The use of local dental laboratories that deal with digital workflow is usually more beneficial in terms of availability of real-time hands-on technical support and faster turnaround times. Dental laboratories owned by a software company usually have more experience in these cases, but are usually more costly and have longer turnaround times. However, orders for a surgical guide can be placed directly from the software itself, which is quite convenient. For clinicians who have made the high initial investment in a 3D printer or CAD/CAM, the long-term cost of fabrication of stents is significantly reduced. In-house fabrication of surgical stents also leads to the least wait-time for implant surgeries.
Clinical limitations to static guided implant surgery
A surgical guide has metal sleeves corresponding to sequential implant drill sizes, allowing only a specific implant drill through at one point in time. This can work as a double-edged sword at times. Owing to the limited space available, it becomes difficult to provide adequate irrigation to the implant site through the course of the surgery. Studies have shown significantly more heat generation in guided implant surgery than free-handed drilling protocols.24,25 A few methods have been introduced to counteract this, such as with the use of internally cooled templates,26 or with the use of drills with internal irrigation.
Guided implant surgery cannot be used in patients with narrow maximum mouth opening. This can limit the use of the guide itself, or longer length implant drills. Similarly, in dentate patients with limited interdental space, the fitting of guide tubes is difficult, if not impossible. The stents, on average, are predictably accurate,27 but improper planning on CBCT, or poor fit of the stent can lead to gross deviations.28
Dynamic guided implant surgery
Dynamic navigation is a form of computer assisted surgery that operates using optical tracking. It uses a stereo vision computer triangulation set-up to guide implant placement. The tracking system can be either active or passive. Passive systems use tracking arrays that reflect light emitted from a light source back to the stereo camera. The active tracking arrays emit infrared light themselves that is tracked directly by stereo cameras. The tracking camera should be able to detect the patient and drill unimpeded in its line of sight.29
The pre-operative workflow for dynamic guided implant surgery is like those of static guided implant surgery. Data manipulation and virtual planning on implant software is essentially the same. The difference is primarily in orienting the CBCT file with the patient's maxillae in real time. Until recently, the practice of fiducial registration for dynamic navigation was the only way to overlap patient's orientation with CBCT. This involved fabrication of an in-office thermoplastic stent that adapted to the patient's teeth following manipulation in hot water. A special fiducial marker was then attached to the stent that underwent a second CBCT scan to overlap the two files. The fiducial registration contained a significant opportunity for user error and an extra CBCT scan involves significant additional radiation to the patient.
This process of fiducial registration has been replaced with trace registration. The current process of registering the CBCT scan to the patient involves selecting three to six landmarks on the scan and tracing around the same landmarks in the patient's mouth with a tracer tool. The entire process has been made user-friendly, reducing the chances of error. The tracing is quite efficient and time saving, usually requiring less than 5 minutes.
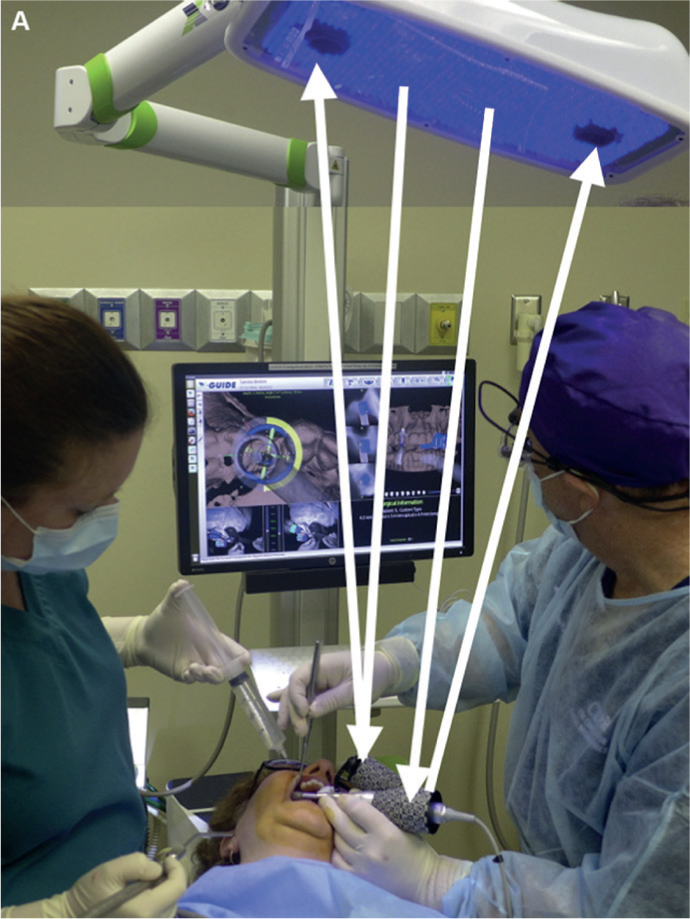
Intra-operatively, tracking arrays called ‘tags’ are attached to the patient and the surgical implant handpiece (Figure 3). These contain reflective spheres that send light back to stereo cameras and triangulate the patient and surgical drill position in real time relative to the pre-surgical plan. The planned implant site is shown on a high-resolution screen attached to a computer with a ‘bulls-eye’ sign. The distance, angular deviation and depth from the planned site can be seen on the computer screen and adjusted accordingly.
Figure 3. Implant placement using dynamic navigation system. Reprinted with kind permission from Elsevier.5
Advantages of dynamic versus static guided surgery
The dynamic navigation system reduces time involved in the surgery because there is no need to wait for the fabrication of a stent. Despite the increased initial expense for equipment, the overall cost is low per procedure. This technique also addresses all the limitations of static guided implant surgery: there is better irrigation during implant placement, as water flow is unimpeded; there is better access to implant site allowing use in posterior sites, in cases of limited inter-occlusal space, and patients with limited mouth opening; it offers safety as a real-time check is always available.
Accuracy of static and dynamic guided implant surgery
A 2021 systematic review and meta-analysis30 reviewed 1298 implant drillings and found dynamic navigation to be clinically acceptable with platform deviation of 1.02 mm, apex deviation of 1.33 mm, and angular deviation of 3.59° from planned sites. Another systematic review and meta-analysis20 assessed 2238 implant placements and concluded static surgical guides to be fairly accurate with platform deviation of 1.20 mm, apex deviation of 1.40 mm and angular deviation of 3.50°. Results for static guides were significantly more accurate in partially dentate arches than edentulous arches.
When comparing guided implant surgery to free-hand placement of implants, guided surgery offers significantly decreased risk. Abdelhey et al,31 in their 2021 systematic review and meta-analysis, found greater implant failure when free-hand surgery was used (6.42%) versus when guided implant surgery was used (2.25%).
Conclusions
Guided implant surgery is accurate and offers multiple benefits over free-hand surgery. Guided surgery decreases the complexity of the procedure and results in predictable implant placement. In recent years, the cost has decreased and access to specialized equipment has become more widely available, resulting in greater use of this technique. There is, however, a learning curve associated with these procedures that can be overcome with comprehensive training.